すぐに投稿するためにソーシャルメディアを購読してください
905nmと1.5μm LiDARの簡単な比較
905nm と 1550/1535nm LiDAR システムの比較を簡略化して明確にしてみましょう。
| 特徴 | 905nm LiDAR | 1550/1535nm ライダー |
| 目の安全 | - より安全ですが、安全のために電力に制限があります。 | - 非常に安全で、より高い電力の使用を可能にします。 |
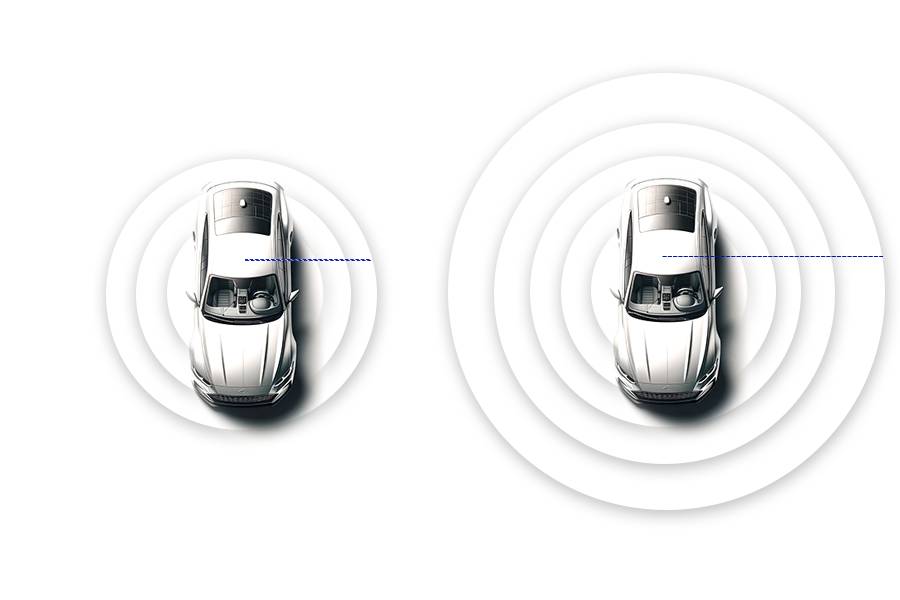
| 範囲 | - 安全上の理由により、範囲が制限される場合があります。 | - 安全に多くの電力を使用できるため、範囲が広がります。 |
| 天候におけるパフォーマンス | - 日光や天候の影響を受けやすくなります。 | - 悪天候でも性能が向上し、日光の影響を受けにくくなります。 |
| 料金 | - より安価で、コンポーネントがより一般的です。 | - より高価で、特殊なコンポーネントを使用します。 |
| 最適な用途 | - 中程度のニーズを持つ、コスト重視のアプリケーション。 | - 自動運転のようなハイエンドの用途には長距離走行と安全性が必要です。 |
1550/1535nmと905nm LiDARシステムの比較では、長波長(1550/1535nm)技術を使用することの利点がいくつか浮き彫りになっています。特に安全性、範囲、そして様々な環境条件における性能の面で優れています。これらの利点により、1550/1535nm LiDARシステムは、自動運転など、高精度と信頼性が求められるアプリケーションに特に適しています。これらの利点を詳しく見ていきましょう。
1. 強化された目の安全性
1550/1535nm LiDARシステムの最大の利点は、人間の目に対する安全性の向上です。波長が長いため、光は角膜と水晶体によってより効率的に吸収され、敏感な網膜への到達を防ぎます。この特性により、これらのシステムは安全な被曝限度内でより高い出力レベルで動作できるため、人間の安全性を損なうことなく高性能なLiDARシステムを必要とするアプリケーションに最適です。

2. より長い検出範囲
1550/1535nm LiDARシステムは、より高い出力で安全に照射できるため、より長い検知範囲を実現できます。これは、タイムリーな判断を行うために遠距離から物体を検知する必要がある自動運転車にとって非常に重要です。これらの波長によって得られる検知範囲の拡大は、予測能力と反応能力を向上させ、自動運転システムの全体的な安全性と効率性を向上させます。
3. 悪天候時のパフォーマンス向上
1550/1535nmの波長で動作するLiDARシステムは、霧、雨、埃などの悪天候下でも優れた性能を発揮します。これらの長波長は、短波長よりも大気中の粒子をより効果的に透過するため、視界不良時でも機能と信頼性を維持できます。この機能は、環境条件に関わらず自律システムの安定した性能を維持するために不可欠です。
4. 太陽光やその他の光源からの干渉の低減
1550/1535nm LiDARのもう一つの利点は、太陽光を含む周囲光からの干渉に対する感度が低いことです。これらのシステムで使用される特定の波長は、自然光や人工光源ではあまり一般的ではないため、LiDARによる環境マッピングの精度に影響を与える可能性のある干渉のリスクを最小限に抑えることができます。この機能は、正確な検出とマッピングが不可欠なシナリオにおいて特に有用です。
5. 材料の浸透
すべてのアプリケーションで主要な考慮事項ではありませんが、1550/1535nm LiDAR システムのより長い波長は、特定の材料との相互作用がわずかに異なる可能性があり、粒子または表面を(ある程度)透過する光が有益な特定の使用例で利点をもたらす可能性があります。
これらの利点があるにもかかわらず、1550/1535nmと905nmのLiDARシステムの選択には、コストとアプリケーション要件も考慮する必要があります。1550/1535nmシステムは優れた性能と安全性を備えていますが、コンポーネントの複雑さと生産量が少ないため、一般的に高価です。したがって、1550/1535nm LiDAR技術を使用するかどうかの決定は、必要な距離、安全性の考慮事項、環境条件、予算の制約など、アプリケーションの具体的なニーズによって決まることが多いです。
さらに読む:
1. Uusitalo, T.、Viheriälä, J.、Virtanen, H.、Hanhinen, S.、Hytönen, R.、Lyytikainen, J.、および Guina, M. (2022)。波長約 1.5 μm のアイセーフ LIDAR アプリケーション向けの高ピーク出力テーパー RWG レーザー ダイオード。[リンク]
抽象的な:「波長約 1.5 μm の目に安全な LIDAR アプリケーション向けの高ピーク出力テーパー RWG レーザー ダイオード」では、自動車用 LIDAR 向けに高ピーク出力および高輝度で目に安全なレーザーを開発し、さらなる改善の可能性を秘めた最先端のピーク出力を実現する方法について説明します。
2. Dai, Z., Wolf, A., Ley, P.-P., Glück, T., Sundermeier, M., & Lachmayer, R. (2022). 自動車用LiDARシステムの要件. Sensors (バーゼル, スイス), 22.[リンク]
抽象的な:「車載用LiDARシステムの要件」では、検出範囲、視野、角度分解能、レーザー安全性などの主要なLiDAR指標を分析し、自動車アプリケーションの技術要件に重点を置いています。
3. Shang, X., Xia, H., Dou, X., Shangguan, M., Li, M., Wang, C., Qiu, J., Zhao, L., & Lin, S. (2017). 1.5μm可視度ライダーにおけるオングストローム波長指数を用いた適応型逆変換アルゴリズム. Optics Communications.[リンク]
抽象的な:「現場オングストローム波長指数を組み込んだ 1.5μm 可視性ライダーの適応反転アルゴリズム」では、高精度で安定性に優れた適応反転アルゴリズムを備えた、混雑した場所でも目に安全な 1.5μm 可視性ライダーを紹介します (Shang 他、2017)。
4.Zhu, X., Elgin, D. (2015). 近赤外線スキャンLIDARの設計におけるレーザー安全性.[リンク]
抽象的な:「近赤外線スキャン LIDAR の設計におけるレーザー安全性」では、目に安全なスキャン LIDAR を設計する際のレーザー安全性の考慮事項について説明し、安全性を確保するには慎重なパラメータ選択が重要であることを示しています (Zhu & Elgin、2015)。
5. Beuth, T., Thiel, D., & Erfurth, MG (2018). 適応とスキャニングLIDARの危険性.[リンク]
抽象的な:「適応とスキャンLIDARの危険性」では、自動車用LIDARセンサーに関連するレーザー安全性の危険性を調査し、複数のLIDARセンサーで構成される複雑なシステムのレーザー安全性評価を再考する必要があることを示唆しています(Beuth et al.、2018)。
レーザーソリューションに関してサポートが必要ですか?
投稿日時: 2024年3月15日