導入
1960 年代後半から 1970 年代前半にかけて、伝統的な航空写真システムのほとんどは、航空機および航空宇宙用の電気光学および電子センサー システムに置き換えられてきました。従来の航空写真は主に可視光の波長で機能しますが、最新の航空機および地上ベースのリモート センシング システムは、可視光、反射赤外線、熱赤外線、およびマイクロ波のスペクトル領域をカバーするデジタル データを生成します。航空写真における従来の視覚的解釈方法は依然として役に立ちます。それでも、リモート センシングは、ターゲット特性の理論モデリング、物体のスペクトル測定、情報抽出のためのデジタル画像分析などの追加アクティビティを含む、より広範囲のアプリケーションをカバーしています。
リモートセンシングは、非接触の長距離検出技術のあらゆる側面を指し、電磁気を使用してターゲットの特性を検出、記録、測定する方法であり、その定義は 1950 年代に初めて提案されました。リモート センシングとマッピングの分野では、アクティブ センシングとパッシブ センシングの 2 つのセンシング モードに分けられます。そのうちの LIDAR センシングはアクティブで、自身のエネルギーを使用してターゲットに光を放射し、ターゲットから反射された光を検出できます。
アクティブ LIDAR センシングとアプリケーション
Lidar (光検出および測距) は、レーザー信号の発信および受信時間に基づいて距離を測定するテクノロジーです。場合によっては、航空機搭載 LiDAR は、航空機搭載レーザー スキャン、マッピング、または LiDAR と同じ意味で適用されます。
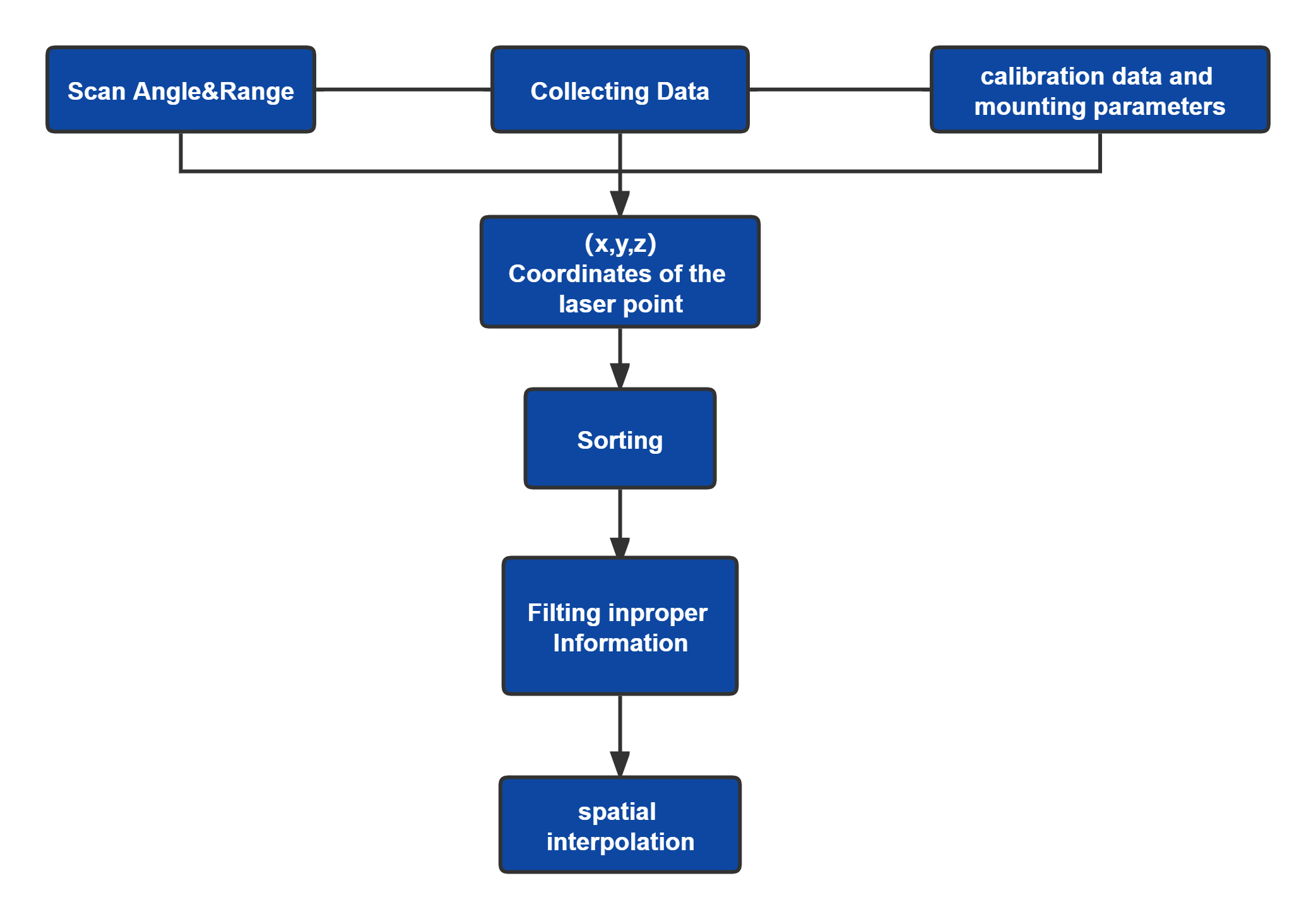
これは、LiDAR 使用時のポイント データ処理の主な手順を示す一般的なフローチャートです。 ( x、y、z) 座標を収集した後、これらの点を並べ替えることで、データのレンダリングと処理の効率を向上させることができます。 LiDAR ポイントの幾何学的処理に加えて、LiDAR フィードバックからの強度情報も役立ちます。
すべてのリモート センシングおよびマッピング アプリケーションにおいて、LiDAR には、太陽光やその他の天候の影響に関係なく、より正確な測定値を取得できるという明確な利点があります。一般的なリモート センシング システムは、レーザー距離計と測位用の測定センサーの 2 つの部分で構成されます。これらのシステムは、イメージングが関与しない (3D 世界が 2D 平面でイメージ化される) ため、幾何学的歪みなく 3D で地理環境を直接測定できます。
当社の LIDAR ソースの一部
アイセーフ LiDAR レーザー光源のセンサーの選択


