導入
1960年代後半から1970年代初頭にかけて、従来の航空写真システムのほとんどは、航空機搭載型および航空宇宙搭載型の電気光学式および電子式センサーシステムに置き換えられました。従来の航空写真は主に可視光波長で動作しますが、現代の航空機搭載型および地上型のリモートセンシングシステムは、可視光、反射赤外線、熱赤外線、マイクロ波のスペクトル領域をカバーするデジタルデータを生成します。航空写真における従来の視覚的解釈方法は依然として有用です。しかし、リモートセンシングは、対象物の特性の理論的モデリング、物体のスペクトル測定、情報抽出のためのデジタル画像解析など、より幅広い用途をカバーしています。
リモートセンシングとは、非接触型長距離探知技術のあらゆる側面を指し、電磁気学を用いて対象物の特性を検出、記録、測定する方法です。この定義は1950年代に初めて提唱されました。リモートセンシングとマッピングの分野では、アクティブセンシングとパッシブセンシングの2つのセンシングモードに分けられます。そのうち、ライダーセンシングはアクティブセンシングであり、自身のエネルギーを用いて対象物に光を照射し、対象物からの反射光を検出します。
アクティブライダーセンシングとアプリケーション
LiDAR(光検出・測距)は、レーザー信号の発信と受信の時間に基づいて距離を測定する技術です。航空機搭載型LiDARは、航空機搭載型レーザースキャン、航空マッピング、LiDARと同義に用いられる場合もあります。
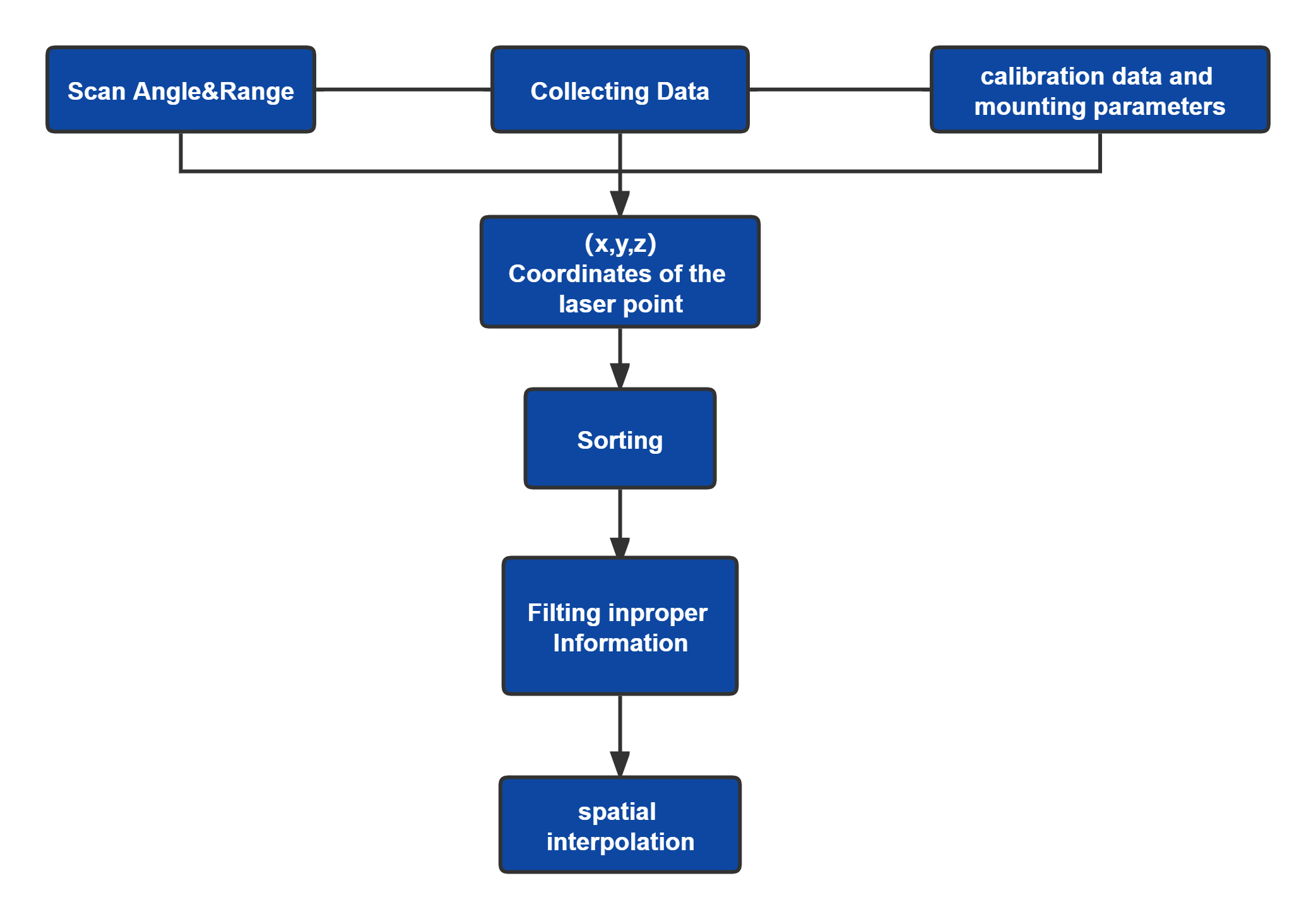
これは、LiDAR使用時のポイントデータ処理の主な手順を示す典型的なフローチャートです。(x, y, z)座標を収集した後、これらのポイントをソートすることで、データのレンダリングと処理の効率を向上させることができます。LiDARポイントの幾何学的処理に加えて、LiDARフィードバックからの強度情報も役立ちます。
あらゆるリモートセンシングおよびマッピングアプリケーションにおいて、LiDARは太陽光やその他の天候の影響を受けずに、より正確な測定を行えるという明確な利点があります。一般的なリモートセンシングシステムは、レーザー距離計と測位用測定センサーの2つの部分で構成されており、画像化を伴わないため(3Dの世界を2D平面で画像化するため)、幾何学的な歪みなく地理環境を3Dで直接測定できます。
当社のLIDARソースの一部
目に安全なLiDARレーザー光源のセンサーの選択肢


